Robotí čtyřnožci "umí chodit" jako skutečná zvířata pomocí AI
Výzkumníci Joseph Humphreys z University of Leeds a Chengxu Zhou z University College London vyvinuli přelomový systém, který umožňuje čtyřnohým robotům adaptovat svou chůzi podle terénu podobně jako zvířata. Jejich práce publikovaná v prestižním časopise Nature Machine Intelligence je významný pokrok v oblasti robotické chůze.
Tři pilíře zvířecí chůze v robotice
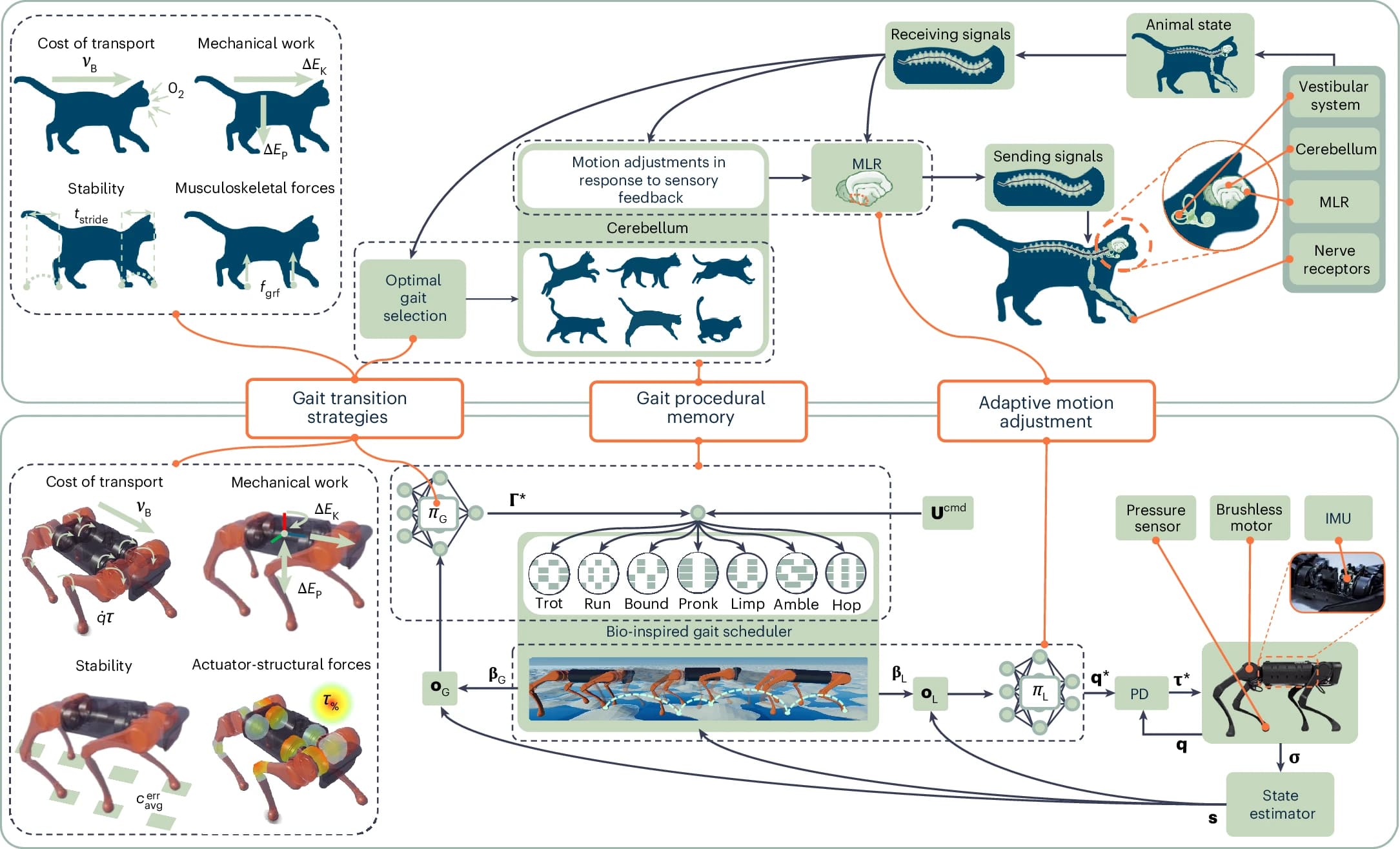
Výzkumný tým identifikoval tři klíčové atributy zvířecí chůze, které dosud nebyly implementovány v robotických systémech. Jedná se o strategie přechodů mezi chůzemi, procedurální paměťí chůze a přizpůsobení pohybu v reálném čase. Tyto principy jsou u zvířat řízeny různými částmi mozku - mezencefalickou pohybovou oblastí (mesencephalic locomotor region) a mozečkem (cerebellum).
Zatímco současné systémy hlubokého posilovaného učení (Deep Reinforcement Learning - DRL) dosahují pozoruhodných výsledků, zůstávají omezené na jednotlivé typy chůze. Naproti tomu zvířata plynule přecházejí mezi různými způsoby pohybu - od klusání přes běh až po specializované chůze jako je skákání nebo poskakování při úniku před predátory.
Biomechanické metriky pro optimální výběr chůze
Výzkumníci vyvinuli systém založený na čtyřech biomechanických metrikách inspirovaných zvířecí chůzí. Náklady na transport měří energetickou efektivitu, nasycení točivého momentu charakterizuje sílu na pohonu a strukturu, externí práce hodnotí mechanickou práci a chyba sledování kontaktu nohy indikuje stabilitu systému.
Tyto metriky jsou sjednoceny v rámci gait selection policy (πG), která na základě aktuálního stavu robota vybírá optimální chůzi z osmi dostupných možností: stání, klus, běh, skok na zadních nohách, poskakování, kulhání, pomalá chůze a skákání.
Bio-inspirovaný plánovač chůze
Klíčovou součástí systému je Bio-inspired Gait Scheduler (BGS), který funguje jako pseudoprocedurální paměť chůze. BGS generuje referenční vzory chůze na základě vysokoúrovňových parametrů a současného stavu robota. Tento systém umožňuje plynulé přechody mezi jakýmikoli páry chůzí, což je zásadní pro adaptabilitu v reálném světě.
BGS využívá upravené Raibert heuristiky pro výpočet referenčních pozic nohou v kartézských souřadnicích s omezeními 0,3 m v ose x, 0,2 m v ose y a 0,1 m v ose z od nominální lokální pozice nohy. Systém také implementuje Froudovo číslo (Ω) pro určení inherentní stability různých chůzí.
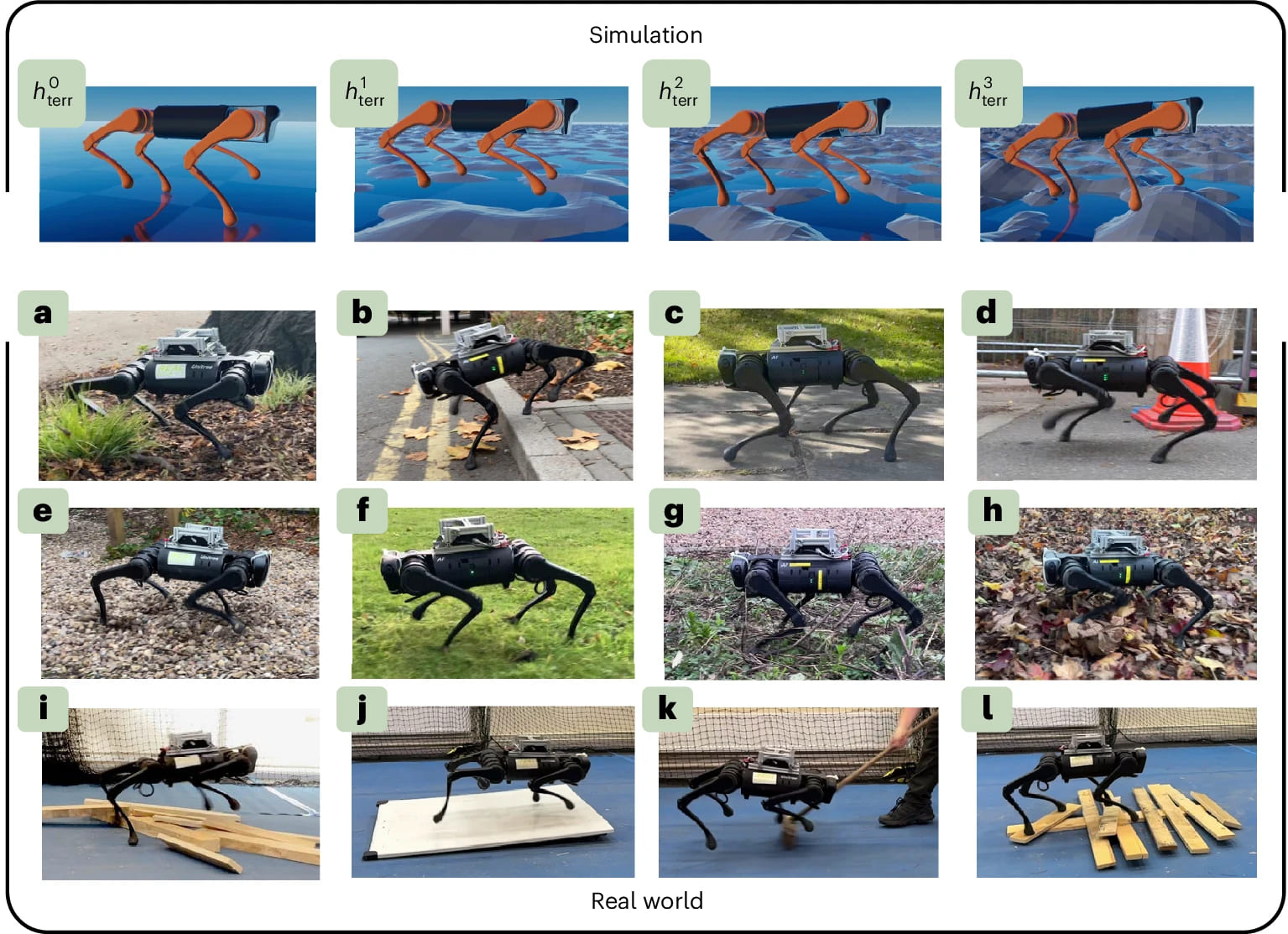
Testování na reálných terénech
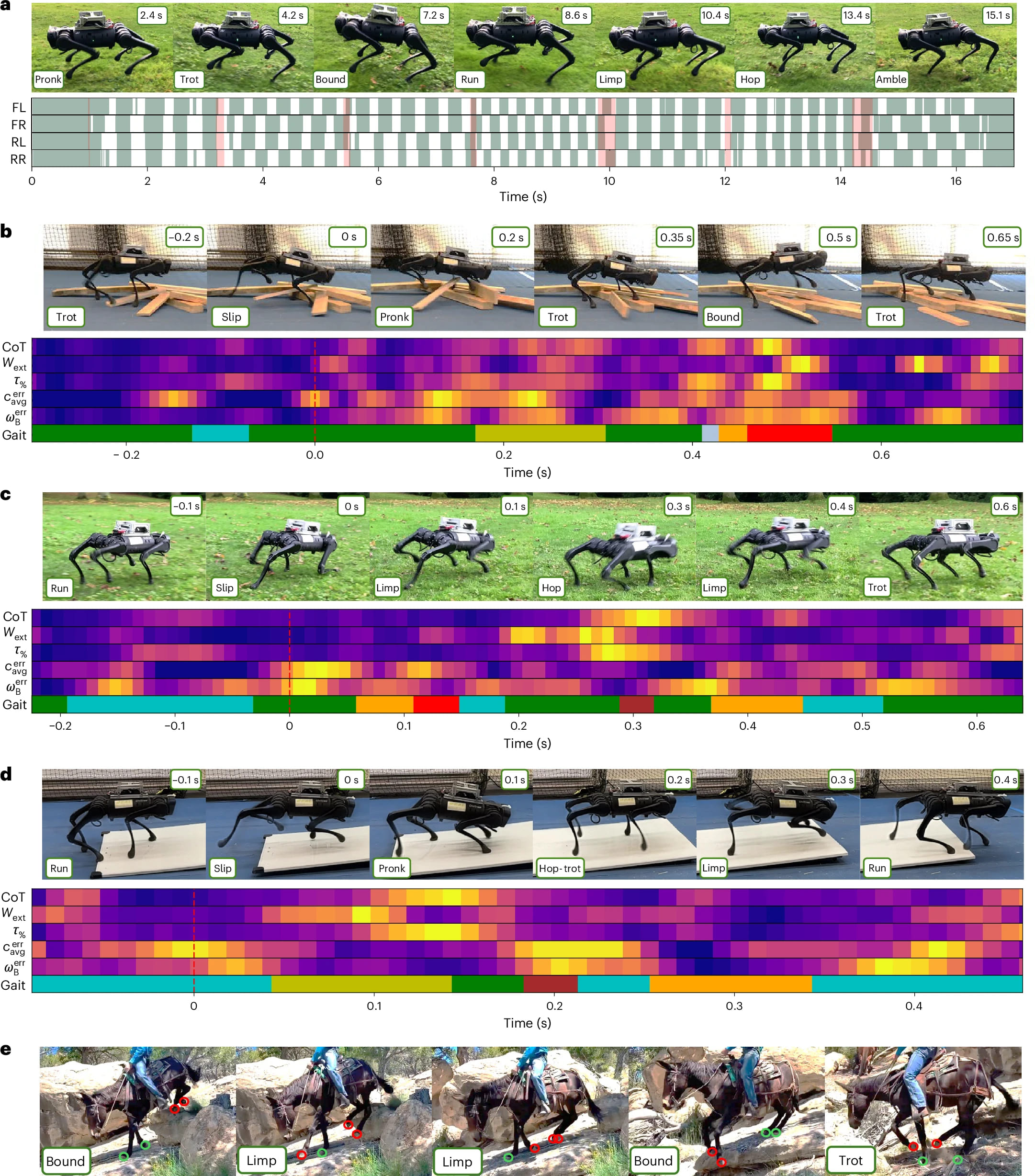
Robot Unitree A1 s 12 stupni volnosti byl testován na široké škále reálných terénů včetně dřevěných štěpků, betonových desek s velkými trhlinami, asfaltu, hlubokých kamenů, travnatého terénu, přerostlých kořenů, spadaného listí, volně ložených trámů a povrchů s nízkým třením.
Během experimentů robot demonstroval schopnost autonomně přecházet mezi nominálními chůzemi (klus a běh) pro běžné podmínky a využívat pomocné chůze (bound, pronk, limp, amble, hop) pro zvládání nestability. Tento vzorec chování přesně kopíruje strategie pozorované u zvířat.
Srovnání se zvířecími strategiemi
Výzkumníci provedli detailní srovnání s daty získanými od psů, koní a vačic. Zjistili, že jejich systém πG^uni věrně kopíruje zvířecí strategie přechodů mezi chůzemi. Při zvyšující se rychlosti robot používá převážně klus při nízkých rychlostech a běh při vysokých rychlostech, přičemž při akceleraci osciluje mezi těmito dvěma chůzemi s rostoucí preferencí běhu.
Toto chování nebylo nikdy explicitně naprogramováno, ale emergentně vzniklo z minimalizace biomechanických metrik, což podporuje hypotézu, že sjednocení těchto metrik skutečně kóduje složitosti zvířecích přechodů chůze.
Výsledky bez externího snímání
Pozoruhodné je, že celý systém funguje pouze s vnitřními senzory - bez využití externího snímání okolí. Robot spoléhá na IMU (inerciální měřicí jednotku), vnitřní zpětnou vazbu z kloubů a estimátor stavu (State Estimator) pro zpracování senzorických dat.
Tato schopnost je zásadní pro praktické nasazení, protože vizuální systémy často nemohou detekovat změny třecího koeficientu terénu nebo strukturální změny mimo dosah předních nohou robota. Systém tak překonává významná omezení současných robotických platforem.
Budoucnost adaptivní robotiky
Výzkum představuje významný krok směrem k robustní, efektivní a všestranné robotické chůzi. Autoři plánují integraci své práce s metodami zaměřenými na Froude-free chůzi (pohyb s žádoucí rychlostí chůze k rovině země) jako je skákání mezi platformami nebo lezení přes překážky.
Tato práce ukazuje, jak může zvířecí motorická inteligence formovat příští generaci adaptivních strojů a otevírá nové možnosti pro nasazení robotů v nepředvídatelných reálných podmínkách.