Díky vědcům z MIT můžete sami trénovat roboty bez programování
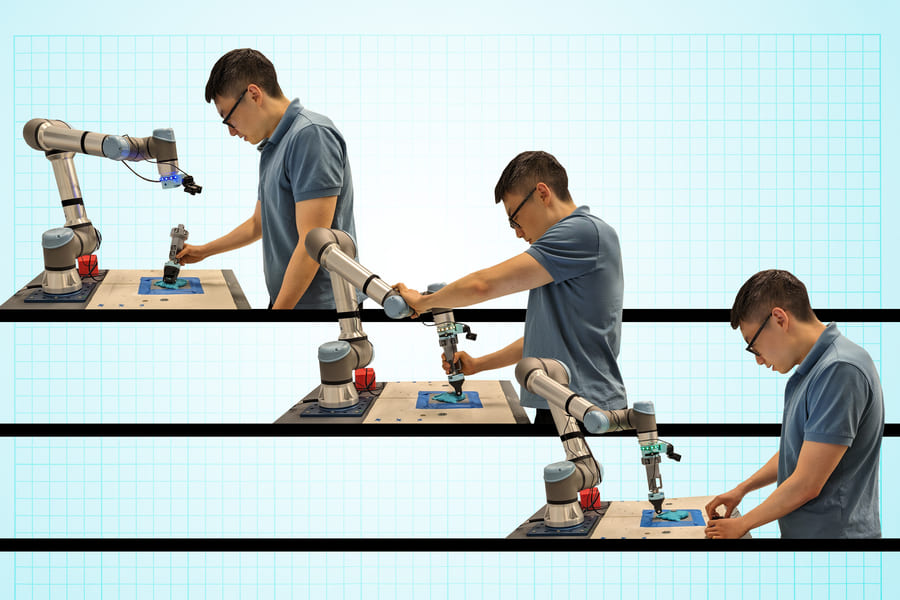
Představte si, že jste na tovární lince a potřebujete rychle naučit robota novou úlohu – třeba přesně stlačit kolíky do otvorů nebo rovnoměrně rozválet gumovou hmotu kolem tyče. Dříve by to vyžadovalo experta na kódování, ale teď to zvládne kdokoli. Inženýři z MIT vyvinuli nový nástroj, který dělá z trénování robotů přirozenou a intuitivní záležitost. Tento ruční přístroj, nazvaný versatile demonstration interface (flexibilní rozhraní pro demonstrace), umožňuje třem různým způsobům učení, což otevírá dveře širšímu okruhu lidí, kteří mohou s roboty spolupracovat. Pojďme se podívat, jak to funguje, a proč to může změnit svět výroby i domácností.
Co je to za nástroj a jak vznikl?
Tento inovativní přístroj je malé, snadno připevnitelné zařízení, které se dá nasadit na běžné kolaborativní robotické rameno. Vyvinuli ho inženýři z MIT, včetně postdoktora Mikea Hagenowa z Katedry aeronautiky a astronautiky, postdoktora Dimosthenise Kontogiorgose z Laboratoře počítačové vědy a umělé inteligence (CSAIL), absolventa Yanwei Wanga, který nedávno získal doktorát z elektrotechniky a informatiky, a profesorky Julie Shah, vedoucí Katedry aeronautiky a astronautiky. Jejich cílem bylo vytvořit systém, který umožní lidem učit roboty nové dovednosti "na místě", bez nutnosti přerušovat práci a reprogramovat software.
Přístroj je vybaven kamerou, která sleduje pohyby a polohu, a senzory síly, které měří tlak aplikovaný během úlohy. Když je připevněn k robotu, zachycuje data z demonstrací a umožňuje robotovi se učit samostatně. Tento přístup vychází z konceptu "učení z demonstrace" (learning from demonstration, zkratka LfD), kde robot napodobuje lidské chování místo složitého programování. Tým se inspiroval existujícími metodami, ale spojil je do jednoho flexibilního nástroje, což je klíčové pro různé úlohy – od manipulace s toxickými látkami po jemné kreslení loga.
Tři způsoby trénování
Co dělá tento nástroj tak výjimečným? Umožňuje tři odlišné metody učení, které si uživatel vybere podle potřeby nebo preference. První je dálkové ovládání: Člověk ovládá robota na dálku, například pomocí joysticku, což je ideální pro nebezpečné úlohy, jako je manipulace s toxickými materiály. Druhá metoda je ruční trénování, kde člověk fyzicky pohybuje robotickým ramenem skrz požadované pohyby – skvělé pro úpravu polohy při přenášení těžkých balíků.
Třetí a často nejoblíbenější je přirozené učení: Přístroj se odpojí od robota a člověk ho drží v ruce, aby provedl úlohu sám. Kamera zaznamenává pohyby a sílu, které robot pak napodobí, když je přístroj znovu připevněn. Například v testech dobrovolníci použili tento způsob k naučení robota rovnoměrně rozválet gumovou hmotu kolem tyče, což připomíná termomoldovací procesy ve výrobě. Tato flexibilita znamená, že na jedné výrobní lince může jeden člověk učit robota dálkově, druhý fyzicky a třetí přirozeně – všechno bez složitého nastavování.
Testování v praxi
Tým otestoval přístroj v místním inovačním centru, kde se výrobní experti učí o nových technologiích. Dobrovolníci, všichni zkušení v průmyslu, použili rozhraní k trénování spolupracujícího robotického ramene na dvě běžné výrobní úlohy: stlačování kolíků do otvorů a rovnoměrné rozválení gumové hmoty kolem tyče. Každý dobrovolník vyzkoušel všechny tři metody.
Výsledky? Přirozené učení bylo nejoblíbenější, protože se cítilo nejpřirozeněji. Nicméně dobrovolníci poznamenali, že každá metoda má své výhody: Dálkové ovládání pro rizikové látky, ruční trénování pro těžké objekty a přirozené pro jemné úlohy, jako je kreslení loga. Tato zpětná vazba pomohla týmu pochopit, jak přístroj rozšiřuje možnosti spolupráce mezi lidmi a roboty nejen ve výrobě, ale potenciálně i v domácnostech nebo péči o pacienty.
Související inovace a budoucnost
Kromě tohoto rozhraní MIT pracuje na dalších nástrojích, které rozšiřují trénování robotů. Například systém PhysicsGen, vyvinutý v Laboratoři počítačové vědy a umělé inteligence (CSAIL), využívá simulace k přizpůsobení trénovacích dat pro specifické roboty. Tento přístup bere lidské demonstrace ve virtuální realitě, mapuje je do 3D simulátoru a optimalizuje pohyby pro efektivitu. Z několika demonstrací vytvoří tisíce simulovaných příkladů, což umožňuje robotům učit se složité úlohy, jako je manipulace s objekty v domácnostech nebo továrnách.
Tyto inovace společně snižují bariéry pro adopci robotů. Podle výzkumů z MIT by takové nástroje mohly rozšířit použití robotů v různých odvětvích, kde je důležitá přesnost a přizpůsobivost. Tým plánuje vylepšit design na základě zpětné vazby a testovat ho na širší škále úloh, což by mohlo vést k chytřejším robotům, kteří pomáhají v každodenním životě.
Tento vývoj z MIT ukazuje, jak technologie dělá roboty přístupnějšími. Pokud jste někdy snili o tom, že naučíte robota vařit nebo skládat krabice, teď je to blíže realitě než kdy dříve. Co na to říkáte – vyzkoušeli byste to?